Note
Go to the end to download the full example code.
Creating motion artifacts on an anatomical EPI with SNAKE-fMRI#
This examples walks through the elementary components of SNAKE and demonstrates how to add motion artifacts to the simulation.
# Imports
import numpy as np
import matplotlib.pyplot as plt
from snake.core.phantom import Phantom
from snake.core.sampling import EPI3dAcquisitionSampler
from snake.core.simulation import GreConfig, SimConfig, default_hardware
Setting up the base simulation Config. This configuration holds all key parameters for the simulation, describing the scanner parameters.
sim_conf = SimConfig(
max_sim_time=6,
seq=GreConfig(TR=50, TE=30, FA=3),
hardware=default_hardware,
)
sim_conf.hardware.n_coils = 8
sim_conf.fov.res_mm = (3, 3, 3)
sim_conf
Creating the base Phantom#
The simulation acquires the data describe in a phantom. A phantom consists of fuzzy segmentation of head tissue, and their MR intrinsic parameters (density, T1, T2, T2*, magnetic susceptibilities)
Here we use Brainweb reference mask and values for convenience.
phantom = Phantom.from_brainweb(
sub_id=4, sim_conf=sim_conf, output_res=1, tissue_file="tissue_7T"
)
# Here are the tissue availables and their parameters
phantom.affine
No matrix size found in the header. The header is probably missing.
array([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]], dtype=float32)
Adding motion to the Phantom#
The motion is added to the phantom by applying a transformation to the simulation’s FOV configuration (as if the phantom was moving in the scanner).
from snake.core.handlers import RandomMotionImageHandler
motion = RandomMotionImageHandler(
ts_std_mms=[1, 1, 1],
rs_std_degs=[0.1, 0.1, 0.1],
)
motion2 = RandomMotionImageHandler(
ts_std_mms=[3, 3, 3],
rs_std_degs=[0.5, 0.5, 0.5],
)
Setting up Acquisition Pattern and Initializing Result file.#
# The next piece of simulation is the acquisition trajectory.
# Here nothing fancy, we are using a EPI (fully sampled), that samples a 3D
# k-space (this akin to the 3D EPI sequence of XXXX)
sampler = EPI3dAcquisitionSampler(accelz=1, acsz=0.1, orderz="top-down")
Acquisition with Cartesian Engine#
We acquire the three setup separately.
from snake.core.engine import EPIAcquisitionEngine
engine = EPIAcquisitionEngine(model="simple")
engine(
"example_nomotion.mrd",
sampler=sampler,
phantom=phantom,
handlers=[],
sim_conf=sim_conf,
worker_chunk_size=16,
n_workers=4,
)
engine(
"example_motion.mrd",
sampler=sampler,
phantom=phantom,
handlers=[motion],
sim_conf=sim_conf,
worker_chunk_size=16,
n_workers=4,
)
engine(
"example_motion2.mrd",
sampler=sampler,
phantom=phantom,
handlers=[motion2],
sim_conf=sim_conf,
worker_chunk_size=16,
n_workers=4,
)
Existing example_nomotion.mrd it will be overwritten
[Errno 2] No such file or directory: 'example_nomotion.mrd'
0%| | 0/120 [00:00<?, ?it/s]
1%| | 1/120 [00:00<00:49, 2.38it/s]
2%|▏ | 2/120 [00:00<00:27, 4.22it/s]
2%|▎ | 3/120 [00:00<00:20, 5.61it/s]
3%|▎ | 4/120 [00:00<00:17, 6.62it/s]
4%|▍ | 5/120 [00:00<00:15, 7.37it/s]
5%|▌ | 6/120 [00:00<00:14, 7.90it/s]
6%|▌ | 7/120 [00:01<00:13, 8.31it/s]
7%|▋ | 8/120 [00:01<00:13, 8.56it/s]
8%|▊ | 9/120 [00:01<00:12, 8.70it/s]
8%|▊ | 10/120 [00:01<00:12, 8.86it/s]
9%|▉ | 11/120 [00:01<00:12, 8.89it/s]
10%|█ | 12/120 [00:01<00:12, 8.85it/s]
11%|█ | 13/120 [00:01<00:12, 8.77it/s]
12%|█▏ | 14/120 [00:01<00:12, 8.78it/s]
12%|█▎ | 15/120 [00:01<00:11, 8.91it/s]
13%|█▎ | 16/120 [00:02<00:11, 9.02it/s]
14%|█▍ | 17/120 [00:02<00:11, 9.05it/s]
15%|█▌ | 18/120 [00:02<00:11, 9.09it/s]
16%|█▌ | 19/120 [00:02<00:11, 9.08it/s]
17%|█▋ | 20/120 [00:02<00:10, 9.12it/s]
18%|█▊ | 21/120 [00:02<00:10, 9.14it/s]
18%|█▊ | 22/120 [00:02<00:10, 9.07it/s]
19%|█▉ | 23/120 [00:02<00:10, 9.11it/s]
20%|██ | 24/120 [00:02<00:10, 9.12it/s]
21%|██ | 25/120 [00:03<00:10, 9.14it/s]
22%|██▏ | 26/120 [00:03<00:10, 9.18it/s]
22%|██▎ | 27/120 [00:03<00:10, 9.14it/s]
23%|██▎ | 28/120 [00:03<00:10, 9.14it/s]
24%|██▍ | 29/120 [00:03<00:09, 9.13it/s]
25%|██▌ | 30/120 [00:03<00:09, 9.14it/s]
26%|██▌ | 31/120 [00:03<00:09, 9.12it/s]
27%|██▋ | 32/120 [00:03<00:09, 9.10it/s]
28%|██▊ | 33/120 [00:03<00:09, 8.99it/s]
28%|██▊ | 34/120 [00:04<00:09, 9.00it/s]
29%|██▉ | 35/120 [00:04<00:09, 9.03it/s]
30%|███ | 36/120 [00:04<00:09, 9.05it/s]
31%|███ | 37/120 [00:04<00:09, 8.98it/s]
32%|███▏ | 38/120 [00:04<00:09, 9.01it/s]
32%|███▎ | 39/120 [00:04<00:08, 9.02it/s]
33%|███▎ | 40/120 [00:04<00:08, 9.06it/s]
34%|███▍ | 41/120 [00:04<00:08, 9.09it/s]
35%|███▌ | 42/120 [00:04<00:08, 9.11it/s]
36%|███▌ | 43/120 [00:05<00:08, 9.14it/s]
37%|███▋ | 44/120 [00:05<00:08, 9.18it/s]
38%|███▊ | 45/120 [00:05<00:08, 9.17it/s]
38%|███▊ | 46/120 [00:05<00:08, 9.20it/s]
39%|███▉ | 47/120 [00:05<00:08, 9.12it/s]
40%|████ | 48/120 [00:05<00:07, 9.19it/s]
41%|████ | 49/120 [00:05<00:07, 9.23it/s]
42%|████▏ | 50/120 [00:05<00:07, 9.23it/s]
42%|████▎ | 51/120 [00:05<00:07, 9.20it/s]
43%|████▎ | 52/120 [00:06<00:07, 9.18it/s]
44%|████▍ | 53/120 [00:06<00:07, 9.12it/s]
45%|████▌ | 54/120 [00:06<00:07, 9.15it/s]
46%|████▌ | 55/120 [00:06<00:07, 9.13it/s]
47%|████▋ | 56/120 [00:06<00:07, 9.14it/s]
48%|████▊ | 57/120 [00:06<00:06, 9.12it/s]
48%|████▊ | 58/120 [00:06<00:06, 9.12it/s]
49%|████▉ | 59/120 [00:06<00:06, 9.09it/s]
50%|█████ | 60/120 [00:06<00:06, 9.09it/s]
51%|█████ | 61/120 [00:07<00:06, 9.11it/s]
52%|█████▏ | 62/120 [00:07<00:06, 9.12it/s]
52%|█████▎ | 63/120 [00:07<00:06, 9.09it/s]
53%|█████▎ | 64/120 [00:07<00:06, 9.10it/s]
54%|█████▍ | 65/120 [00:07<00:06, 9.11it/s]
55%|█████▌ | 66/120 [00:07<00:05, 9.13it/s]
56%|█████▌ | 67/120 [00:07<00:05, 9.12it/s]
57%|█████▋ | 68/120 [00:07<00:05, 9.13it/s]
57%|█████▊ | 69/120 [00:07<00:05, 9.15it/s]
58%|█████▊ | 70/120 [00:07<00:05, 9.15it/s]
59%|█████▉ | 71/120 [00:08<00:05, 9.20it/s]
60%|██████ | 72/120 [00:08<00:05, 9.23it/s]
61%|██████ | 73/120 [00:08<00:05, 9.23it/s]
62%|██████▏ | 74/120 [00:08<00:04, 9.24it/s]
62%|██████▎ | 75/120 [00:08<00:04, 9.22it/s]
63%|██████▎ | 76/120 [00:08<00:04, 9.26it/s]
64%|██████▍ | 77/120 [00:08<00:04, 9.27it/s]
65%|██████▌ | 78/120 [00:08<00:04, 9.27it/s]
66%|██████▌ | 79/120 [00:08<00:04, 9.17it/s]
67%|██████▋ | 80/120 [00:09<00:04, 9.15it/s]
68%|██████▊ | 81/120 [00:09<00:04, 9.18it/s]
68%|██████▊ | 82/120 [00:09<00:04, 9.16it/s]
69%|██████▉ | 83/120 [00:09<00:04, 9.18it/s]
70%|███████ | 84/120 [00:09<00:03, 9.15it/s]
71%|███████ | 85/120 [00:09<00:03, 9.16it/s]
72%|███████▏ | 86/120 [00:09<00:03, 9.15it/s]
72%|███████▎ | 87/120 [00:09<00:03, 9.14it/s]
73%|███████▎ | 88/120 [00:09<00:03, 9.06it/s]
74%|███████▍ | 89/120 [00:10<00:03, 9.07it/s]
75%|███████▌ | 90/120 [00:10<00:03, 9.11it/s]
76%|███████▌ | 91/120 [00:10<00:03, 9.11it/s]
77%|███████▋ | 92/120 [00:10<00:03, 9.13it/s]
78%|███████▊ | 93/120 [00:10<00:02, 9.14it/s]
78%|███████▊ | 94/120 [00:10<00:02, 9.15it/s]
79%|███████▉ | 95/120 [00:10<00:02, 9.19it/s]
80%|████████ | 96/120 [00:10<00:02, 9.22it/s]
81%|████████ | 97/120 [00:10<00:02, 9.21it/s]
82%|████████▏ | 98/120 [00:11<00:02, 9.23it/s]
82%|████████▎ | 99/120 [00:11<00:02, 9.18it/s]
83%|████████▎ | 100/120 [00:11<00:02, 9.14it/s]
84%|████████▍ | 101/120 [00:11<00:02, 9.15it/s]
85%|████████▌ | 102/120 [00:11<00:01, 9.15it/s]
86%|████████▌ | 103/120 [00:11<00:01, 9.16it/s]
87%|████████▋ | 104/120 [00:11<00:01, 9.11it/s]
88%|████████▊ | 105/120 [00:11<00:01, 9.09it/s]
88%|████████▊ | 106/120 [00:11<00:01, 9.08it/s]
89%|████████▉ | 107/120 [00:12<00:01, 9.05it/s]
90%|█████████ | 108/120 [00:12<00:01, 9.07it/s]
91%|█████████ | 109/120 [00:12<00:01, 9.07it/s]
92%|█████████▏| 110/120 [00:12<00:01, 9.05it/s]
92%|█████████▎| 111/120 [00:12<00:00, 9.05it/s]
93%|█████████▎| 112/120 [00:12<00:00, 9.07it/s]
94%|█████████▍| 113/120 [00:12<00:00, 9.06it/s]
95%|█████████▌| 114/120 [00:12<00:00, 8.87it/s]
96%|█████████▌| 115/120 [00:12<00:00, 8.90it/s]
97%|█████████▋| 116/120 [00:13<00:00, 8.92it/s]
98%|█████████▊| 117/120 [00:13<00:00, 8.97it/s]
98%|█████████▊| 118/120 [00:13<00:00, 9.02it/s]
99%|█████████▉| 119/120 [00:13<00:00, 9.06it/s]
100%|██████████| 120/120 [00:13<00:00, 9.10it/s]
100%|██████████| 120/120 [00:13<00:00, 8.91it/s]
No coil_cov found in the dataset.
0%| | 0/120 [00:00<?, ?it/s]
13%|█▎ | 16/120 [00:06<00:41, 2.48it/s]
27%|██▋ | 32/120 [00:07<00:16, 5.21it/s]
40%|████ | 48/120 [00:07<00:08, 8.54it/s]
53%|█████▎ | 64/120 [00:08<00:04, 12.34it/s]
67%|██████▋ | 80/120 [00:08<00:02, 16.50it/s]
80%|████████ | 96/120 [00:08<00:01, 20.93it/s]
93%|█████████▎| 112/120 [00:09<00:00, 24.93it/s]
128it [00:09, 28.60it/s]
128it [00:09, 12.89it/s]
Existing example_motion.mrd it will be overwritten
[Errno 2] No such file or directory: 'example_motion.mrd'
0%| | 0/120 [00:00<?, ?it/s]
1%| | 1/120 [00:00<00:13, 8.97it/s]
2%|▏ | 2/120 [00:00<00:13, 8.95it/s]
2%|▎ | 3/120 [00:00<00:12, 9.04it/s]
3%|▎ | 4/120 [00:00<00:12, 9.09it/s]
4%|▍ | 5/120 [00:00<00:12, 9.10it/s]
5%|▌ | 6/120 [00:00<00:12, 9.13it/s]
6%|▌ | 7/120 [00:00<00:12, 9.15it/s]
7%|▋ | 8/120 [00:00<00:12, 9.11it/s]
8%|▊ | 9/120 [00:00<00:12, 9.14it/s]
8%|▊ | 10/120 [00:01<00:12, 9.07it/s]
9%|▉ | 11/120 [00:01<00:11, 9.10it/s]
10%|█ | 12/120 [00:01<00:11, 9.07it/s]
11%|█ | 13/120 [00:01<00:11, 9.06it/s]
12%|█▏ | 14/120 [00:01<00:11, 9.06it/s]
12%|█▎ | 15/120 [00:01<00:11, 9.07it/s]
13%|█▎ | 16/120 [00:01<00:11, 9.09it/s]
14%|█▍ | 17/120 [00:01<00:11, 9.09it/s]
15%|█▌ | 18/120 [00:01<00:11, 9.09it/s]
16%|█▌ | 19/120 [00:02<00:11, 9.11it/s]
17%|█▋ | 20/120 [00:02<00:10, 9.11it/s]
18%|█▊ | 21/120 [00:02<00:10, 9.12it/s]
18%|█▊ | 22/120 [00:02<00:10, 9.10it/s]
19%|█▉ | 23/120 [00:02<00:10, 9.09it/s]
20%|██ | 24/120 [00:02<00:10, 9.10it/s]
21%|██ | 25/120 [00:02<00:10, 9.10it/s]
22%|██▏ | 26/120 [00:02<00:10, 9.10it/s]
22%|██▎ | 27/120 [00:02<00:10, 9.09it/s]
23%|██▎ | 28/120 [00:03<00:10, 9.06it/s]
24%|██▍ | 29/120 [00:03<00:09, 9.13it/s]
25%|██▌ | 30/120 [00:03<00:09, 9.14it/s]
26%|██▌ | 31/120 [00:03<00:09, 9.17it/s]
27%|██▋ | 32/120 [00:03<00:09, 9.17it/s]
28%|██▊ | 33/120 [00:03<00:09, 8.98it/s]
28%|██▊ | 34/120 [00:03<00:09, 8.94it/s]
29%|██▉ | 35/120 [00:03<00:09, 8.94it/s]
30%|███ | 36/120 [00:03<00:09, 8.96it/s]
31%|███ | 37/120 [00:04<00:09, 8.98it/s]
32%|███▏ | 38/120 [00:04<00:09, 8.97it/s]
32%|███▎ | 39/120 [00:04<00:09, 8.98it/s]
33%|███▎ | 40/120 [00:04<00:08, 9.04it/s]
34%|███▍ | 41/120 [00:04<00:08, 9.05it/s]
35%|███▌ | 42/120 [00:04<00:08, 9.09it/s]
36%|███▌ | 43/120 [00:04<00:08, 8.87it/s]
37%|███▋ | 44/120 [00:04<00:08, 8.92it/s]
38%|███▊ | 45/120 [00:04<00:08, 8.94it/s]
38%|███▊ | 46/120 [00:05<00:08, 8.97it/s]
39%|███▉ | 47/120 [00:05<00:08, 9.02it/s]
40%|████ | 48/120 [00:05<00:07, 9.06it/s]
41%|████ | 49/120 [00:05<00:07, 9.10it/s]
42%|████▏ | 50/120 [00:05<00:07, 9.09it/s]
42%|████▎ | 51/120 [00:05<00:07, 9.12it/s]
43%|████▎ | 52/120 [00:05<00:07, 9.11it/s]
44%|████▍ | 53/120 [00:05<00:07, 9.06it/s]
45%|████▌ | 54/120 [00:05<00:07, 9.06it/s]
46%|████▌ | 55/120 [00:06<00:07, 9.11it/s]
47%|████▋ | 56/120 [00:06<00:06, 9.17it/s]
48%|████▊ | 57/120 [00:06<00:06, 9.17it/s]
48%|████▊ | 58/120 [00:06<00:06, 9.23it/s]
49%|████▉ | 59/120 [00:06<00:06, 9.21it/s]
50%|█████ | 60/120 [00:06<00:06, 9.24it/s]
51%|█████ | 61/120 [00:06<00:06, 9.20it/s]
52%|█████▏ | 62/120 [00:06<00:06, 9.23it/s]
52%|█████▎ | 63/120 [00:06<00:06, 9.22it/s]
53%|█████▎ | 64/120 [00:07<00:06, 9.20it/s]
54%|█████▍ | 65/120 [00:07<00:05, 9.17it/s]
55%|█████▌ | 66/120 [00:07<00:05, 9.17it/s]
56%|█████▌ | 67/120 [00:07<00:05, 9.16it/s]
57%|█████▋ | 68/120 [00:07<00:05, 9.09it/s]
57%|█████▊ | 69/120 [00:07<00:05, 8.97it/s]
58%|█████▊ | 70/120 [00:07<00:05, 9.06it/s]
59%|█████▉ | 71/120 [00:07<00:05, 9.14it/s]
60%|██████ | 72/120 [00:07<00:05, 9.17it/s]
61%|██████ | 73/120 [00:08<00:05, 9.20it/s]
62%|██████▏ | 74/120 [00:08<00:04, 9.22it/s]
62%|██████▎ | 75/120 [00:08<00:04, 9.22it/s]
63%|██████▎ | 76/120 [00:08<00:04, 9.25it/s]
64%|██████▍ | 77/120 [00:08<00:04, 9.24it/s]
65%|██████▌ | 78/120 [00:08<00:04, 9.21it/s]
66%|██████▌ | 79/120 [00:08<00:04, 9.18it/s]
67%|██████▋ | 80/120 [00:08<00:04, 9.19it/s]
68%|██████▊ | 81/120 [00:08<00:04, 9.21it/s]
68%|██████▊ | 82/120 [00:09<00:04, 9.21it/s]
69%|██████▉ | 83/120 [00:09<00:04, 9.22it/s]
70%|███████ | 84/120 [00:09<00:03, 9.22it/s]
71%|███████ | 85/120 [00:09<00:03, 9.24it/s]
72%|███████▏ | 86/120 [00:09<00:03, 9.24it/s]
72%|███████▎ | 87/120 [00:09<00:03, 9.25it/s]
73%|███████▎ | 88/120 [00:09<00:03, 9.23it/s]
74%|███████▍ | 89/120 [00:09<00:03, 9.25it/s]
75%|███████▌ | 90/120 [00:09<00:03, 9.23it/s]
76%|███████▌ | 91/120 [00:09<00:03, 9.23it/s]
77%|███████▋ | 92/120 [00:10<00:03, 9.21it/s]
78%|███████▊ | 93/120 [00:10<00:02, 9.24it/s]
78%|███████▊ | 94/120 [00:10<00:02, 9.21it/s]
79%|███████▉ | 95/120 [00:10<00:02, 9.24it/s]
80%|████████ | 96/120 [00:10<00:02, 9.22it/s]
81%|████████ | 97/120 [00:10<00:02, 9.23it/s]
82%|████████▏ | 98/120 [00:10<00:02, 9.23it/s]
82%|████████▎ | 99/120 [00:10<00:02, 9.22it/s]
83%|████████▎ | 100/120 [00:10<00:02, 9.22it/s]
84%|████████▍ | 101/120 [00:11<00:02, 9.24it/s]
85%|████████▌ | 102/120 [00:11<00:01, 9.25it/s]
86%|████████▌ | 103/120 [00:11<00:01, 9.25it/s]
87%|████████▋ | 104/120 [00:11<00:01, 9.26it/s]
88%|████████▊ | 105/120 [00:11<00:01, 9.27it/s]
88%|████████▊ | 106/120 [00:11<00:01, 9.25it/s]
89%|████████▉ | 107/120 [00:11<00:01, 9.26it/s]
90%|█████████ | 108/120 [00:11<00:01, 9.23it/s]
91%|█████████ | 109/120 [00:11<00:01, 9.22it/s]
92%|█████████▏| 110/120 [00:12<00:01, 9.19it/s]
92%|█████████▎| 111/120 [00:12<00:00, 9.20it/s]
93%|█████████▎| 112/120 [00:12<00:00, 9.20it/s]
94%|█████████▍| 113/120 [00:12<00:00, 9.23it/s]
95%|█████████▌| 114/120 [00:12<00:00, 9.21it/s]
96%|█████████▌| 115/120 [00:12<00:00, 9.24it/s]
97%|█████████▋| 116/120 [00:12<00:00, 9.24it/s]
98%|█████████▊| 117/120 [00:12<00:00, 9.20it/s]
98%|█████████▊| 118/120 [00:12<00:00, 9.20it/s]
99%|█████████▉| 119/120 [00:13<00:00, 9.22it/s]
100%|██████████| 120/120 [00:13<00:00, 9.17it/s]
100%|██████████| 120/120 [00:13<00:00, 9.14it/s]
/volatile/github-ci-mind-inria/.local/lib/python3.10/site-packages/xsdata/formats/dataclass/parsers/utils.py:126: ConverterWarning: Failed to convert value for `waveformInformationType.waveformType`
`41407` is not a valid `waveformInformationTypeWaveformType`
warnings.warn(message, ConverterWarning)
No coil_cov found in the dataset.
0%| | 0/120 [00:00<?, ?it/s]
13%|█▎ | 16/120 [00:06<00:40, 2.55it/s]
27%|██▋ | 32/120 [00:06<00:16, 5.36it/s]
40%|████ | 48/120 [00:07<00:08, 8.73it/s]
53%|█████▎ | 64/120 [00:07<00:04, 12.49it/s]
67%|██████▋ | 80/120 [00:08<00:02, 16.54it/s]
80%|████████ | 96/120 [00:08<00:01, 20.75it/s]
93%|█████████▎| 112/120 [00:09<00:00, 24.81it/s]
128it [00:09, 28.51it/s]
128it [00:09, 13.02it/s]
Existing example_motion2.mrd it will be overwritten
[Errno 2] No such file or directory: 'example_motion2.mrd'
0%| | 0/120 [00:00<?, ?it/s]
1%| | 1/120 [00:00<00:13, 8.81it/s]
2%|▏ | 2/120 [00:00<00:13, 8.91it/s]
2%|▎ | 3/120 [00:00<00:12, 9.01it/s]
3%|▎ | 4/120 [00:00<00:12, 9.12it/s]
4%|▍ | 5/120 [00:00<00:12, 9.11it/s]
5%|▌ | 6/120 [00:00<00:12, 9.10it/s]
6%|▌ | 7/120 [00:00<00:12, 9.12it/s]
7%|▋ | 8/120 [00:00<00:12, 9.15it/s]
8%|▊ | 9/120 [00:00<00:12, 9.15it/s]
8%|▊ | 10/120 [00:01<00:11, 9.17it/s]
9%|▉ | 11/120 [00:01<00:12, 8.99it/s]
10%|█ | 12/120 [00:01<00:11, 9.05it/s]
11%|█ | 13/120 [00:01<00:11, 9.10it/s]
12%|█▏ | 14/120 [00:01<00:11, 9.14it/s]
12%|█▎ | 15/120 [00:01<00:11, 9.13it/s]
13%|█▎ | 16/120 [00:01<00:11, 9.16it/s]
14%|█▍ | 17/120 [00:01<00:11, 9.13it/s]
15%|█▌ | 18/120 [00:01<00:11, 9.18it/s]
16%|█▌ | 19/120 [00:02<00:10, 9.19it/s]
17%|█▋ | 20/120 [00:02<00:10, 9.17it/s]
18%|█▊ | 21/120 [00:02<00:10, 9.18it/s]
18%|█▊ | 22/120 [00:02<00:10, 9.21it/s]
19%|█▉ | 23/120 [00:02<00:10, 9.21it/s]
20%|██ | 24/120 [00:02<00:10, 9.19it/s]
21%|██ | 25/120 [00:02<00:10, 9.18it/s]
22%|██▏ | 26/120 [00:02<00:10, 9.17it/s]
22%|██▎ | 27/120 [00:02<00:10, 9.18it/s]
23%|██▎ | 28/120 [00:03<00:09, 9.23it/s]
24%|██▍ | 29/120 [00:03<00:09, 9.21it/s]
25%|██▌ | 30/120 [00:03<00:09, 9.20it/s]
26%|██▌ | 31/120 [00:03<00:09, 9.21it/s]
27%|██▋ | 32/120 [00:03<00:09, 9.22it/s]
28%|██▊ | 33/120 [00:03<00:09, 9.25it/s]
28%|██▊ | 34/120 [00:03<00:09, 9.22it/s]
29%|██▉ | 35/120 [00:03<00:09, 9.23it/s]
30%|███ | 36/120 [00:03<00:09, 9.25it/s]
31%|███ | 37/120 [00:04<00:09, 9.17it/s]
32%|███▏ | 38/120 [00:04<00:08, 9.17it/s]
32%|███▎ | 39/120 [00:04<00:08, 9.21it/s]
33%|███▎ | 40/120 [00:04<00:08, 9.20it/s]
34%|███▍ | 41/120 [00:04<00:08, 9.25it/s]
35%|███▌ | 42/120 [00:04<00:08, 9.24it/s]
36%|███▌ | 43/120 [00:04<00:08, 9.22it/s]
37%|███▋ | 44/120 [00:04<00:08, 9.21it/s]
38%|███▊ | 45/120 [00:04<00:08, 9.22it/s]
38%|███▊ | 46/120 [00:05<00:08, 9.22it/s]
39%|███▉ | 47/120 [00:05<00:07, 9.23it/s]
40%|████ | 48/120 [00:05<00:07, 9.22it/s]
41%|████ | 49/120 [00:05<00:07, 9.21it/s]
42%|████▏ | 50/120 [00:05<00:07, 9.22it/s]
42%|████▎ | 51/120 [00:05<00:07, 9.23it/s]
43%|████▎ | 52/120 [00:05<00:07, 9.19it/s]
44%|████▍ | 53/120 [00:05<00:07, 9.21it/s]
45%|████▌ | 54/120 [00:05<00:07, 9.21it/s]
46%|████▌ | 55/120 [00:05<00:07, 9.22it/s]
47%|████▋ | 56/120 [00:06<00:06, 9.21it/s]
48%|████▊ | 57/120 [00:06<00:06, 9.23it/s]
48%|████▊ | 58/120 [00:06<00:06, 9.23it/s]
49%|████▉ | 59/120 [00:06<00:06, 9.24it/s]
50%|█████ | 60/120 [00:06<00:06, 9.24it/s]
51%|█████ | 61/120 [00:06<00:06, 9.23it/s]
52%|█████▏ | 62/120 [00:06<00:06, 9.20it/s]
52%|█████▎ | 63/120 [00:06<00:06, 9.23it/s]
53%|█████▎ | 64/120 [00:06<00:06, 9.22it/s]
54%|█████▍ | 65/120 [00:07<00:05, 9.21it/s]
55%|█████▌ | 66/120 [00:07<00:05, 9.22it/s]
56%|█████▌ | 67/120 [00:07<00:05, 9.24it/s]
57%|█████▋ | 68/120 [00:07<00:05, 9.24it/s]
57%|█████▊ | 69/120 [00:07<00:05, 9.27it/s]
58%|█████▊ | 70/120 [00:07<00:05, 9.20it/s]
59%|█████▉ | 71/120 [00:07<00:05, 9.20it/s]
60%|██████ | 72/120 [00:07<00:05, 9.20it/s]
61%|██████ | 73/120 [00:07<00:05, 9.22it/s]
62%|██████▏ | 74/120 [00:08<00:04, 9.22it/s]
62%|██████▎ | 75/120 [00:08<00:04, 9.23it/s]
63%|██████▎ | 76/120 [00:08<00:04, 9.23it/s]
64%|██████▍ | 77/120 [00:08<00:04, 9.22it/s]
65%|██████▌ | 78/120 [00:08<00:04, 9.23it/s]
66%|██████▌ | 79/120 [00:08<00:04, 9.24it/s]
67%|██████▋ | 80/120 [00:08<00:04, 9.21it/s]
68%|██████▊ | 81/120 [00:08<00:04, 9.24it/s]
68%|██████▊ | 82/120 [00:08<00:04, 9.22it/s]
69%|██████▉ | 83/120 [00:09<00:04, 9.25it/s]
70%|███████ | 84/120 [00:09<00:03, 9.23it/s]
71%|███████ | 85/120 [00:09<00:03, 9.24it/s]
72%|███████▏ | 86/120 [00:09<00:03, 9.20it/s]
72%|███████▎ | 87/120 [00:09<00:03, 9.24it/s]
73%|███████▎ | 88/120 [00:09<00:03, 9.22it/s]
74%|███████▍ | 89/120 [00:09<00:03, 9.22it/s]
75%|███████▌ | 90/120 [00:09<00:03, 9.23it/s]
76%|███████▌ | 91/120 [00:09<00:03, 9.24it/s]
77%|███████▋ | 92/120 [00:10<00:03, 9.24it/s]
78%|███████▊ | 93/120 [00:10<00:02, 9.24it/s]
78%|███████▊ | 94/120 [00:10<00:02, 9.22it/s]
79%|███████▉ | 95/120 [00:10<00:02, 9.24it/s]
80%|████████ | 96/120 [00:10<00:02, 9.23it/s]
81%|████████ | 97/120 [00:10<00:02, 9.26it/s]
82%|████████▏ | 98/120 [00:10<00:02, 9.22it/s]
82%|████████▎ | 99/120 [00:10<00:02, 9.23it/s]
83%|████████▎ | 100/120 [00:10<00:02, 9.23it/s]
84%|████████▍ | 101/120 [00:10<00:02, 9.23it/s]
85%|████████▌ | 102/120 [00:11<00:01, 9.24it/s]
86%|████████▌ | 103/120 [00:11<00:01, 9.17it/s]
87%|████████▋ | 104/120 [00:11<00:01, 9.18it/s]
88%|████████▊ | 105/120 [00:11<00:01, 9.19it/s]
88%|████████▊ | 106/120 [00:11<00:01, 9.19it/s]
89%|████████▉ | 107/120 [00:11<00:01, 9.19it/s]
90%|█████████ | 108/120 [00:11<00:01, 9.19it/s]
91%|█████████ | 109/120 [00:11<00:01, 9.20it/s]
92%|█████████▏| 110/120 [00:11<00:01, 9.19it/s]
92%|█████████▎| 111/120 [00:12<00:00, 9.22it/s]
93%|█████████▎| 112/120 [00:12<00:00, 9.23it/s]
94%|█████████▍| 113/120 [00:12<00:00, 9.25it/s]
95%|█████████▌| 114/120 [00:12<00:00, 9.26it/s]
96%|█████████▌| 115/120 [00:12<00:00, 9.27it/s]
97%|█████████▋| 116/120 [00:12<00:00, 9.26it/s]
98%|█████████▊| 117/120 [00:12<00:00, 9.26it/s]
98%|█████████▊| 118/120 [00:12<00:00, 9.24it/s]
99%|█████████▉| 119/120 [00:12<00:00, 9.23it/s]
100%|██████████| 120/120 [00:13<00:00, 9.23it/s]
100%|██████████| 120/120 [00:13<00:00, 9.20it/s]
No coil_cov found in the dataset.
0%| | 0/120 [00:00<?, ?it/s]
13%|█▎ | 16/120 [00:06<00:40, 2.58it/s]
27%|██▋ | 32/120 [00:06<00:16, 5.38it/s]
40%|████ | 48/120 [00:07<00:08, 8.78it/s]
53%|█████▎ | 64/120 [00:07<00:04, 12.51it/s]
67%|██████▋ | 80/120 [00:08<00:02, 16.40it/s]
80%|████████ | 96/120 [00:08<00:01, 20.76it/s]
93%|█████████▎| 112/120 [00:09<00:00, 24.50it/s]
128it [00:09, 27.77it/s]
128it [00:09, 12.97it/s]
Simple reconstruction#
from snake.mrd_utils import CartesianFrameDataLoader
from snake.toolkit.reconstructors import ZeroFilledReconstructor
with CartesianFrameDataLoader("example_nomotion.mrd") as data_loader:
rec = ZeroFilledReconstructor(n_jobs=1)
rec_nomotion = rec.reconstruct(data_loader).squeeze()
with CartesianFrameDataLoader("example_motion.mrd") as data_loader:
rec = ZeroFilledReconstructor(n_jobs=1)
rec_motion = rec.reconstruct(data_loader).squeeze()
motion = data_loader.get_dynamic(0)
with CartesianFrameDataLoader("example_motion2.mrd") as data_loader:
rec = ZeroFilledReconstructor(n_jobs=1)
rec_motion2 = rec.reconstruct(data_loader).squeeze()
motion2 = data_loader.get_dynamic(0)
0%| | 0/2 [00:00<?, ?it/s]
50%|█████ | 1/2 [00:00<00:00, 3.97it/s]
100%|██████████| 2/2 [00:00<00:00, 5.28it/s]
100%|██████████| 2/2 [00:00<00:00, 4.46it/s]
0%| | 0/2 [00:00<?, ?it/s]
50%|█████ | 1/2 [00:00<00:00, 4.02it/s]
100%|██████████| 2/2 [00:00<00:00, 5.27it/s]
100%|██████████| 2/2 [00:00<00:00, 4.46it/s]
0%| | 0/2 [00:00<?, ?it/s]
50%|█████ | 1/2 [00:00<00:00, 3.82it/s]
100%|██████████| 2/2 [00:00<00:00, 5.07it/s]
100%|██████████| 2/2 [00:00<00:00, 4.29it/s]
with CartesianFrameDataLoader("example_motion2.mrd") as data_loader:
sim_conf.max_sim_time
rec_motion.shape
(2, 60, 72, 60)
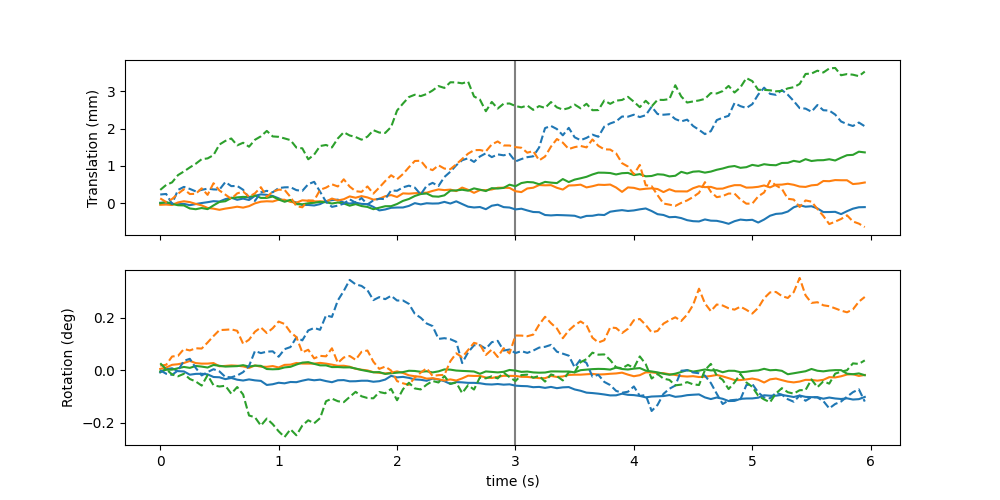
Show the motion#
fig, axs = plt.subplots(2, 1, figsize=(10, 5), sharex=True)
time = np.arange(len(motion.data[0])) * sim_conf.seq.TR / 1000
TR_vol = 3 # We generated 2 frames in 6 seconds
axs[0].axvline(TR_vol, c="gray")
axs[1].axvline(TR_vol, c="gray")
axs[0].plot(time, motion.data[:3, :].T)
axs[1].plot(time, motion.data[3:, :].T)
axs[0].set_prop_cycle(None) # reset color cycling
axs[1].set_prop_cycle(None)
axs[0].plot(time, motion2.data[:3, :].T, linestyle="dashed")
axs[1].plot(time, motion2.data[3:, :].T, linestyle="dashed")
axs[1].set_xlabel("time (s)")
axs[0].set_ylabel("Translation (mm)")
axs[1].set_ylabel("Rotation (deg)")
Text(76.22222222222221, 0.5, 'Rotation (deg)')
Visualizing the reconstructed data#
import matplotlib.pyplot as plt
from snake.toolkit.plotting import axis3dcut
fig, axs = plt.subplots(1, 3, figsize=(26, 5))
axis3dcut(
rec_motion[0].T,
None,
None,
cbar=False,
cuts=(0.5, 0.5, 0.5),
ax=axs[0],
)
axis3dcut(
rec_motion2[0].T,
None,
None,
cbar=False,
cuts=(0.5, 0.5, 0.5),
ax=axs[1],
)
axis3dcut(rec_nomotion[0].T, None, None, cbar=False, cuts=(0.5, 0.5, 0.5), ax=axs[2])
axs[0].set_title("Small motion")
axs[1].set_title("Big motion")
axs[2].set_title("No motion")
plt.show()

/volatile/github-ci-mind-inria/gpu_mind_runner/_work/_tool/Python/3.10.16/x64/lib/python3.10/site-packages/numpy/lib/_function_base_impl.py:4620: RuntimeWarning: invalid value encountered in subtract
diff_b_a = subtract(b, a)
sim_conf.seq.TR_eff
50
Total running time of the script: (1 minutes 15.219 seconds)