conify#
- mrinufft.trajectories.tools.conify(trajectory: ndarray[tuple[int, ...], dtype[_ScalarType_co]], nb_cones: int, z_tilt: str | float | None = None, in_out: bool = False, max_angle: float = 1.5707963267948966, borderless: bool = True) ndarray[tuple[int, ...], dtype[_ScalarType_co]][source]#
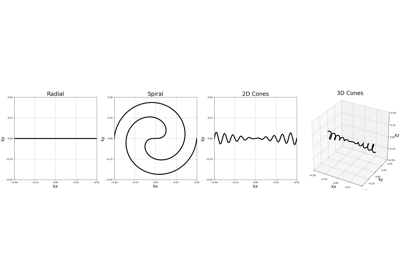
Distort 2D or 3D trajectories into cones along the \(k_z\)-axis.
- Parameters:
trajectory (NDArray) – Trajectory to conify.
nb_cones (int) – Number of cones repeating the provided trajectory.
z_tilt (str | float, optional) – Tilt of the trajectory over the \(k_z\)-axis, by default None.
in_out (bool, optional) – Whether to account for the in-out nature of some trajectories to avoid hard angles around the center, by default False.
max_angle (float, optional) – Maximum angle of the cones, by default pi / 2.
borderless (bool, optional) – Whether the cones should reach max_angle or not, and avoid 1D cones if equal to pi / 2, by default True.
- Returns:
Conified trajectory.
- Return type:
NDArray